Nový web open-cube.fel.cvut.cz (ve výstavbě)…
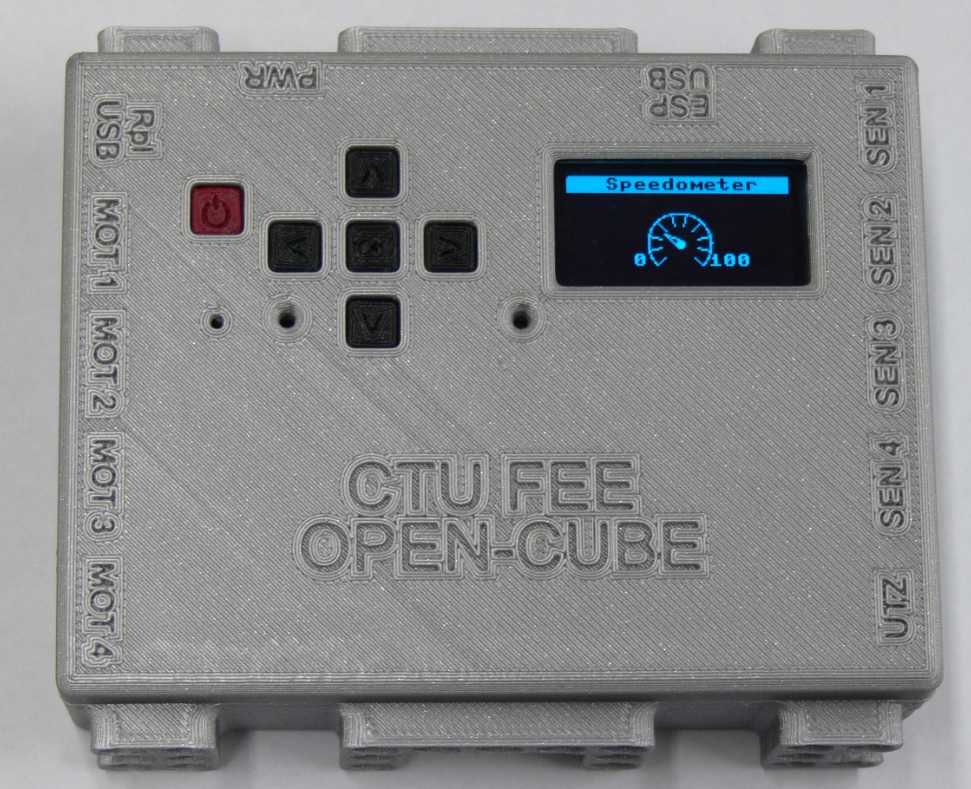
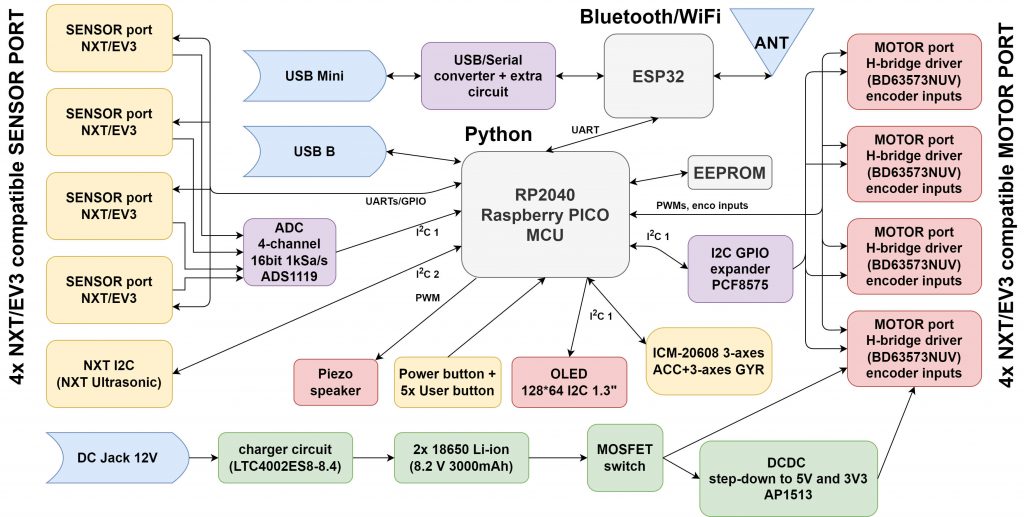
Alternativní otevřená řídicí kostka pro komponenty z LEGO setů NXT a EV3 (senzory a motory). Založená na Raspberry Pi Pico (ARM mikrokontrolér RP2040), programovatelná v jazyce MicroPython.
Vzhledem ke špatné dostupnosti řídicích jednotek LEGO NXT a EV3, které používáme ve výuce a také tomu, že nový “SPIKE” nás příliš neoslovil, rozhodli jsme se pokusit se vyvinout alternativní řídicí jednotku, která by byla kompatibilní se senzory a motory z obou setů – NXT a EV3. Jako základní stavební prvek jsme zvolili ARM mikrokontrolér RP2040 z aktuálně velmi populární a dobře dostupné platformy Raspberry Pi Pico. Jednotku by tedy mělo být možné programovat v jazyce MicroPython, což je výhodné, protože s Pythonem začínají naši prváci v prvním semestru programu Kybernetika a Robotika na FEL-ČVUT. Pro komunikaci s okolím – ideálně například běh PID regulátoru v reálném čase mimo kostku například v MATLABu – je v jednotce použit modul ESP-32, kdy lze použít Bluetooth nebo WiFi připojení. S Bluetooth jsme testovali obousměrný přenos rychlostí 200x za sekundu.
Aktuálně je dokončen vývoj a výroba první verze HW řídicí kostky (sestaveny zatím dva kusy…), probíhá testování funkčnosti HW. V rámci předmětu Práce v týmu v magisterské etapě programu KyR byly v letním semestru 2022 naprogramovány základní rutiny v MicroPythonu pro ovládání jednotlivých periférií. Aktuálně se Open-Cube věnují dva studenti v rámci svého bakalářského projektu. Cílem projektu je skloubit všechny doposud vytvořené prvky dohromady, otestovat HW a vytvořit demonstrační úlohu (například sledování čáry) s popisem HW, FW a vlastního programování “na vyšší úrovni” tak, aby bylo použití studenty prvního ročníku intuitivní a snadno pochopitelné.
Chcete se dozvědět více? Sledujte tuto stránku, kterou budeme postupně aktualizovat. V případě zájmu o spolupráci se můžete obrátit na Ing. Davida Novotného z Katedry měření, FEL, ČVUT, který výše uvedenou bakalářskou práci vede. Projekt je nazván Open-Cube, všechny materiály (schéma, FW….) jsou tedy dostupné (gitlab FEL, linky níže).
Aktuální info:
4/2023 – Firmware byl díky úsilí obou bakalářských studentů přepracován – nízkoúrovňové funkce jsou nyní v C, dají se zkompilovat do vlastního MicroPython balíku a tedy snadno uživatelsky používat. Probíhá update HW návrhu (odstranění chyb první verze, mírné vylepšení…), po jejímž ověření bude vyrobena cca 20ti kusová série pro testování a pilotní nasazení. Budou uvolněny i ve veškeré podklady (schémata, návrh DPS, výrobní podklady).
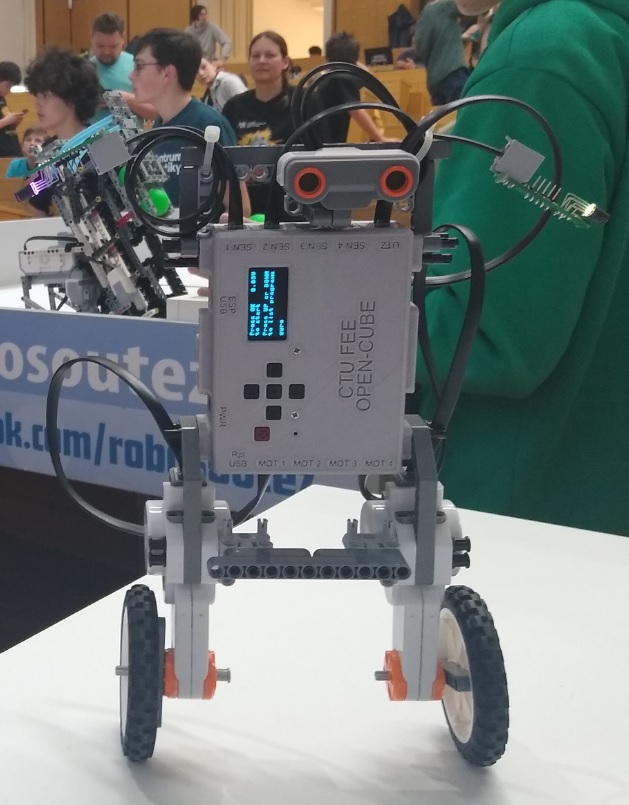
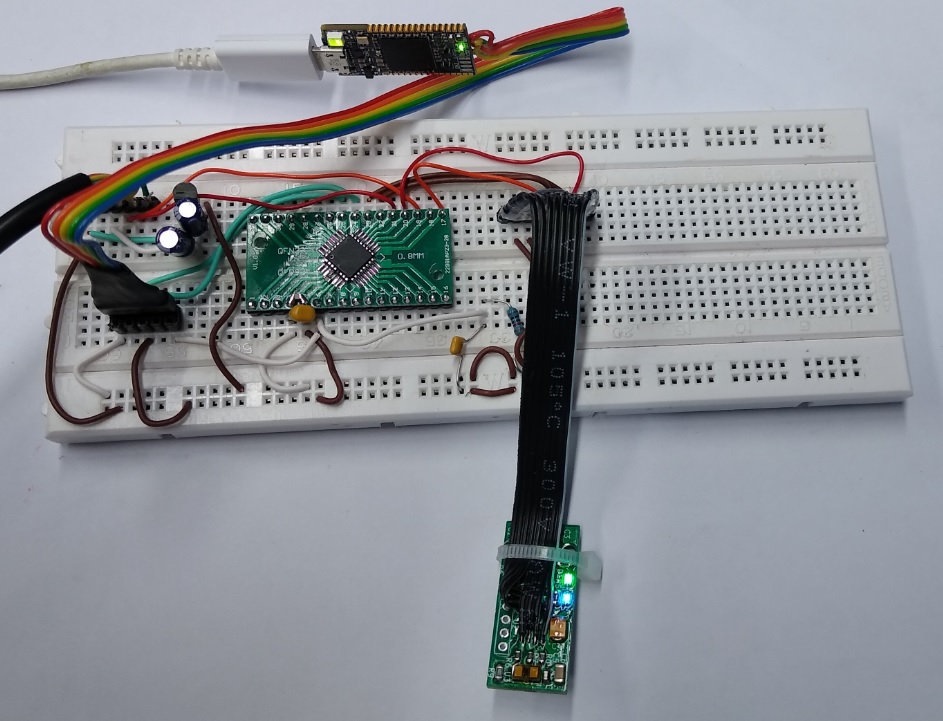
Video první jízdy velmi improvizovaného robota po čáře, včetně zobrazení interních veličin na PC:
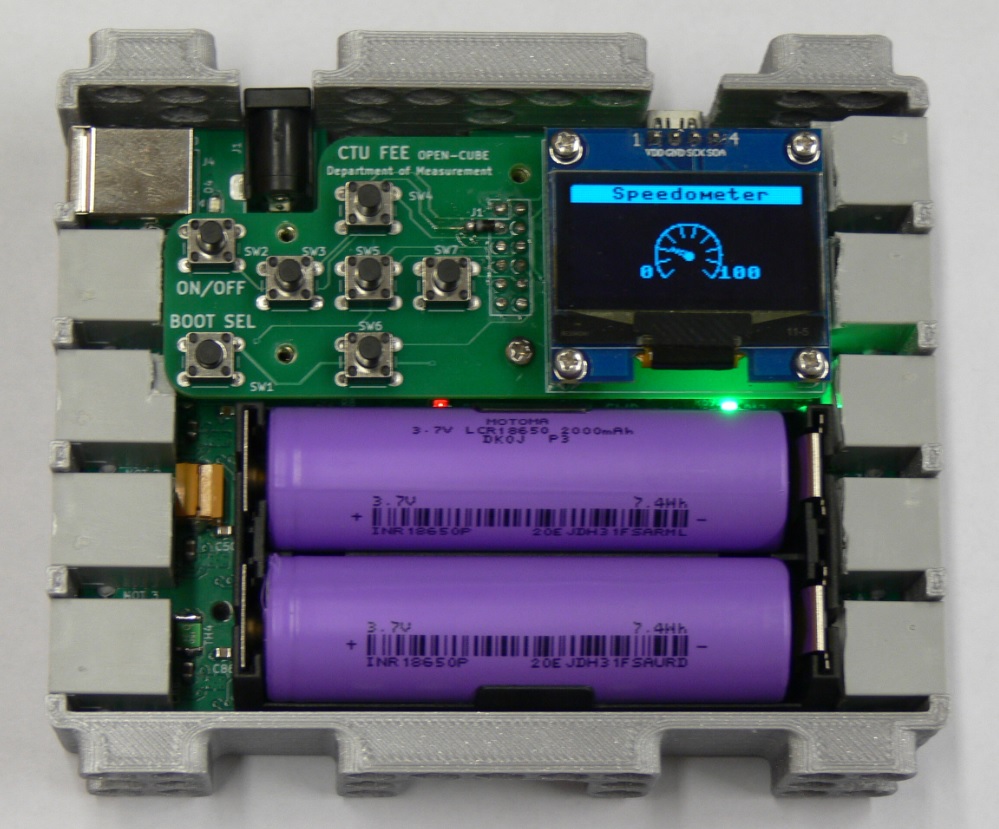
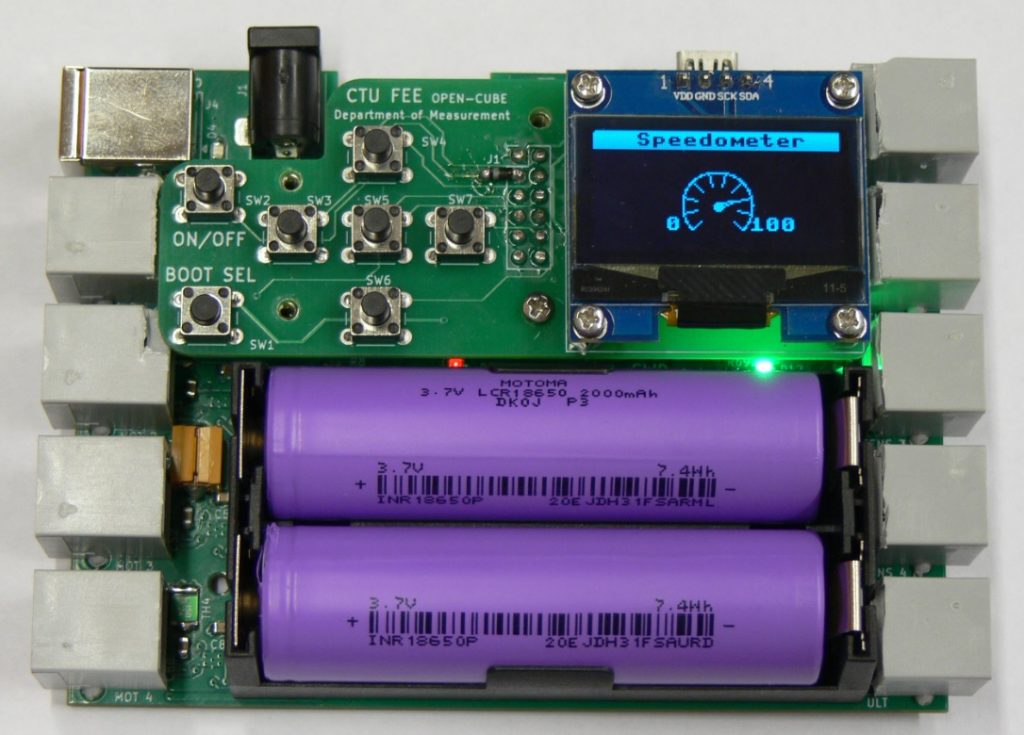
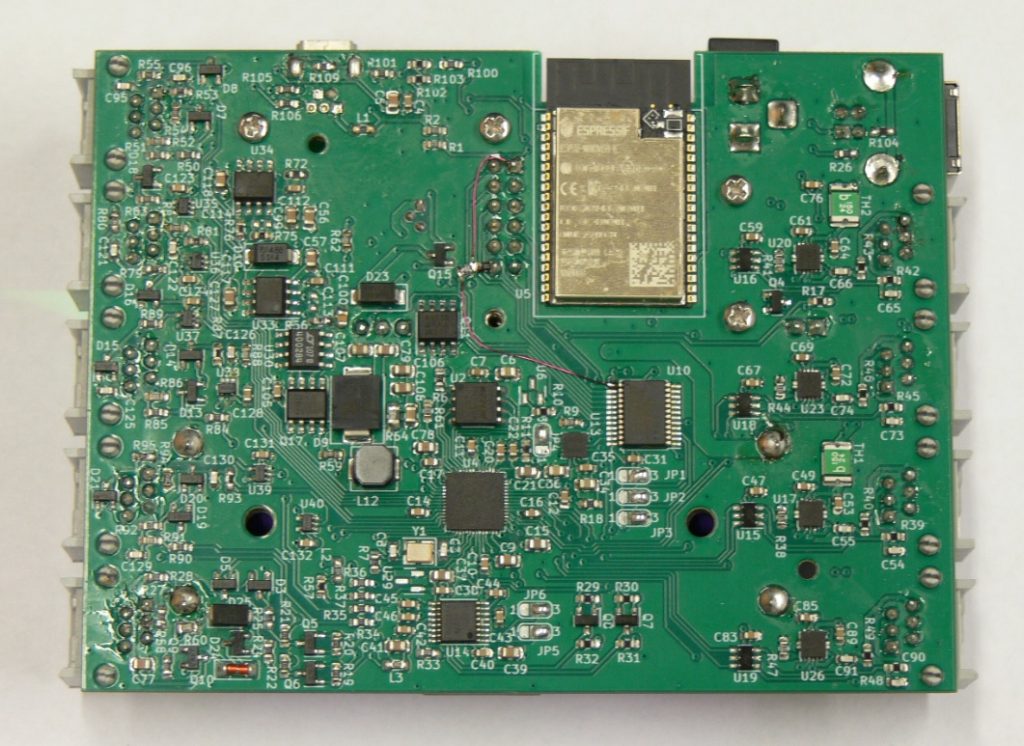
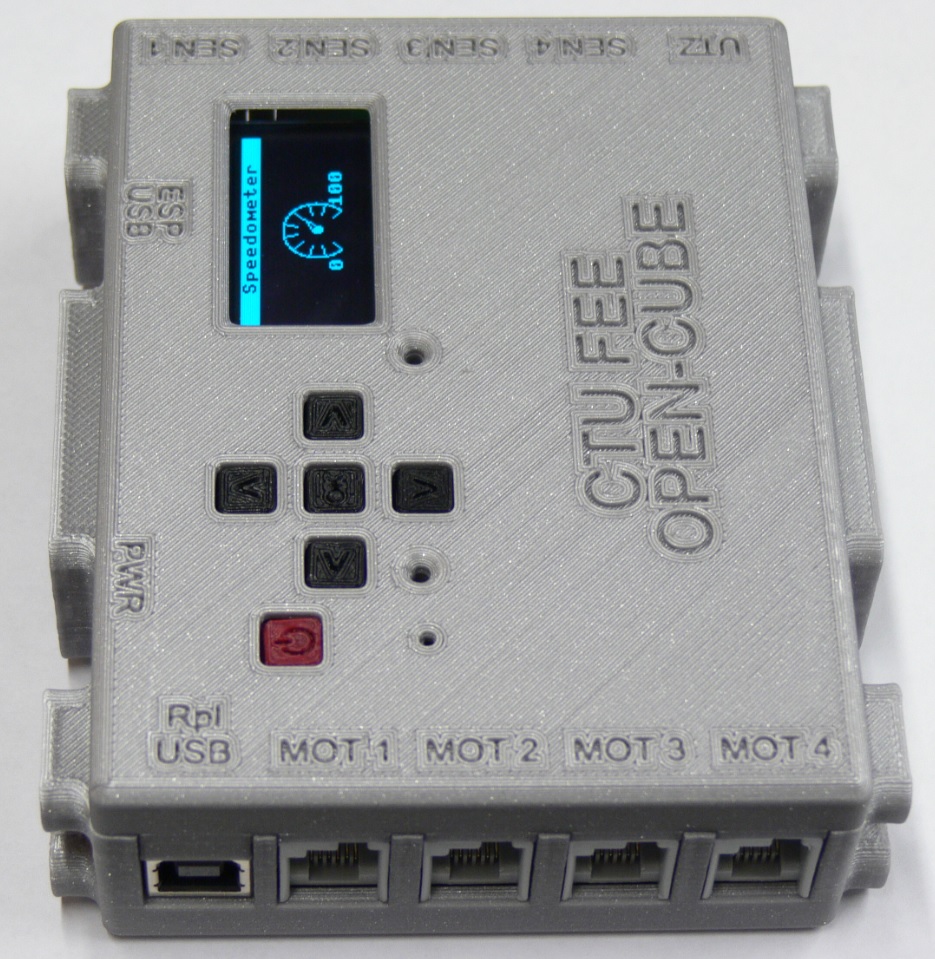
Několik fotek aktuální verze hardware:



Dokumentace první verze je k dispozici na FEL gitlab serveru, jak elektrické zapojení tak firmware.
https://gitlab.fel.cvut.cz/open-cube/open-cube
https://gitlab.fel.cvut.cz/open-cube/schematics
Three PID regulators (position, speed, angle), uses embedded 3-axial ACC+GYRO, position and turning can be controlled via Bluetooth link
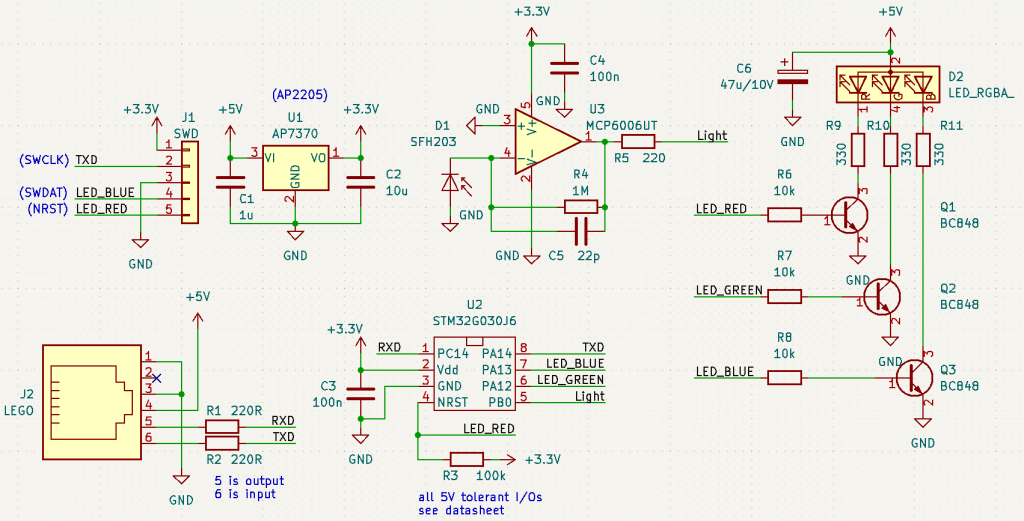
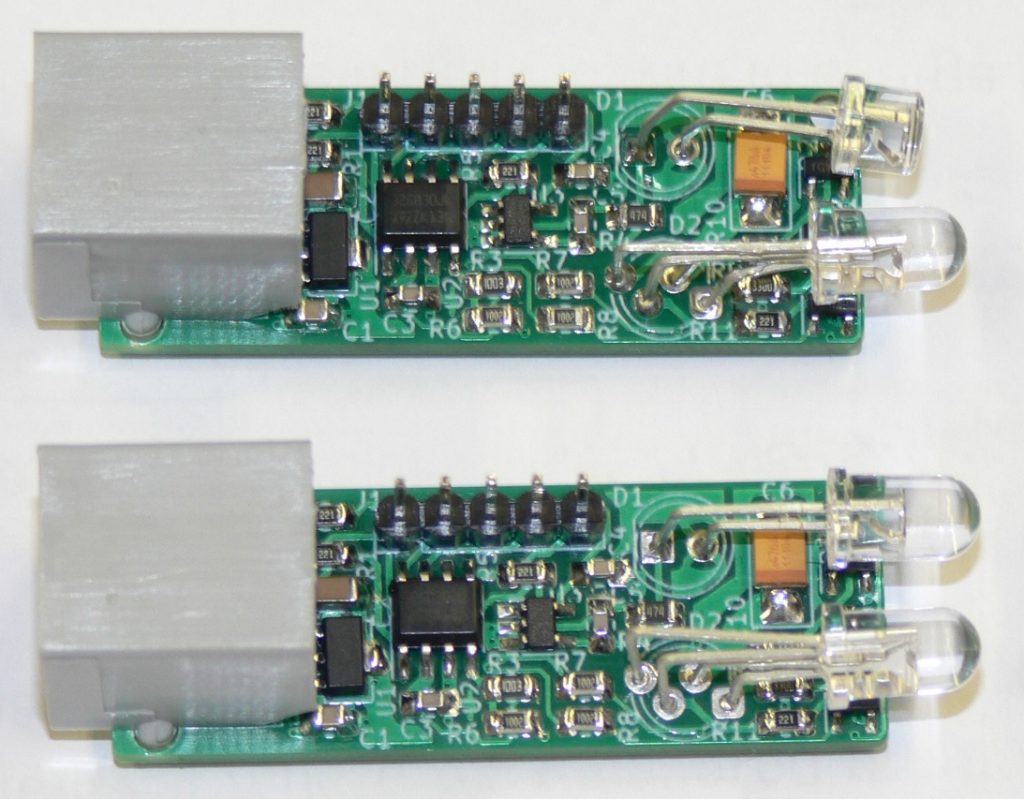
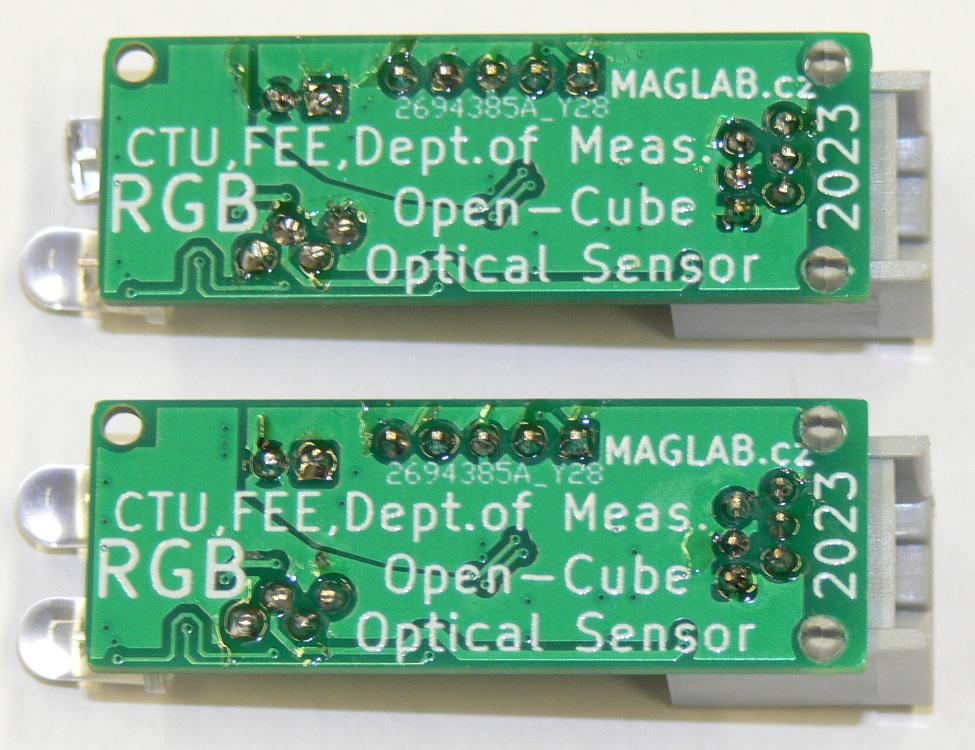
Development of custom sensors for Open-Cube
Optical (color) reflective sensor
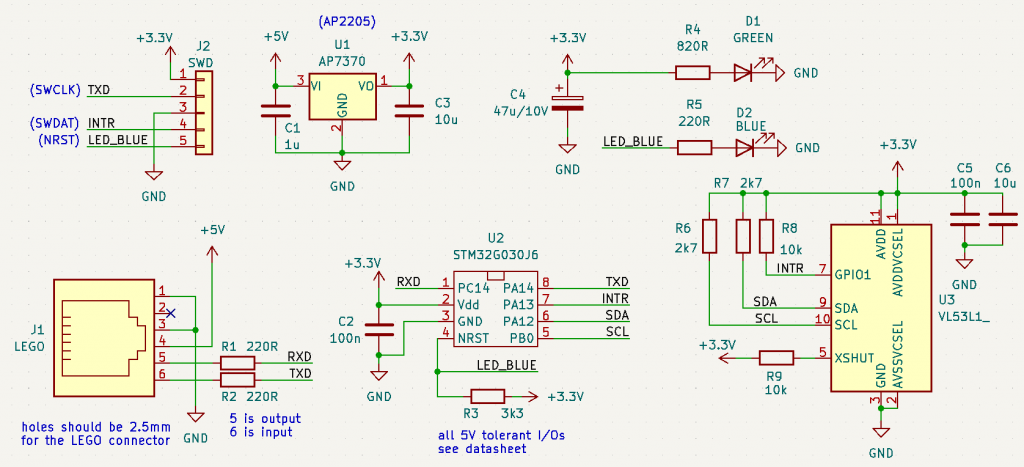
RGB sensor based on STM32G030 8-pin 32-bit microcontroller and some more electrical components
LASER Distance sensor (in development) /ultrasonic sensor replacement – alternative?/
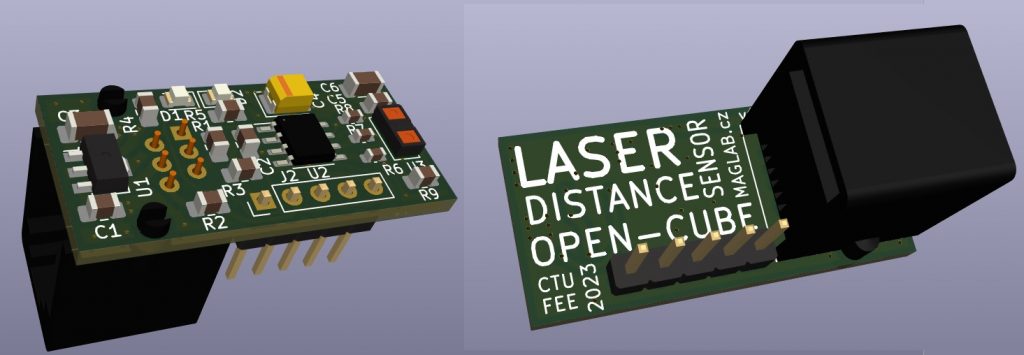
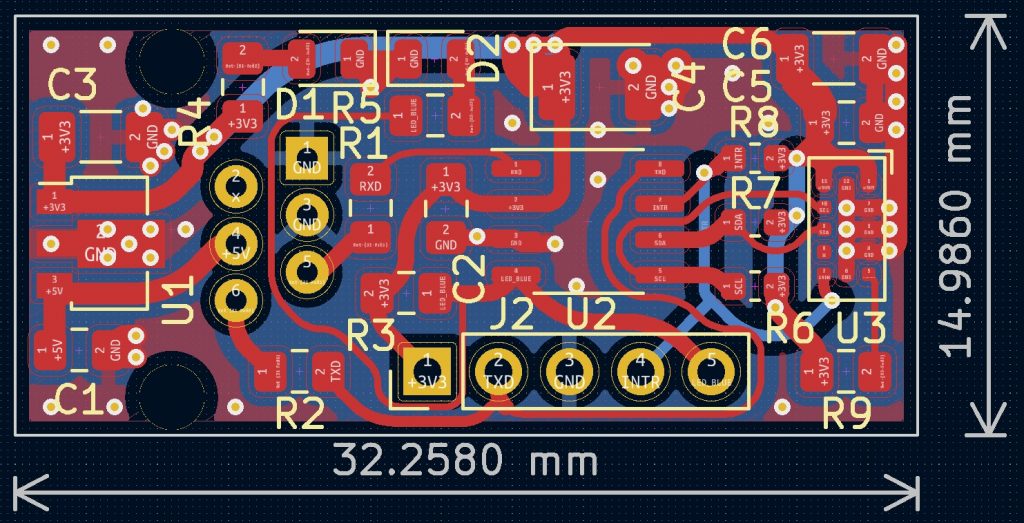
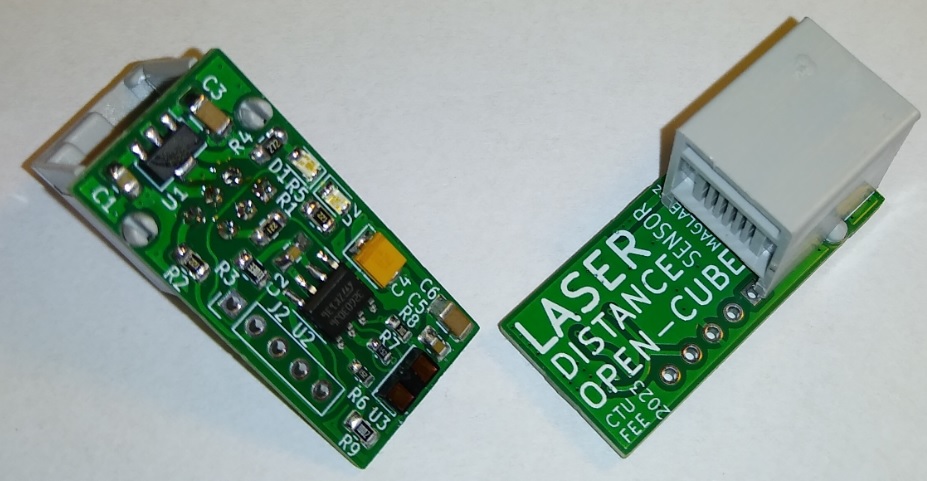
Looking for a C programmer… to make it work (preferably in STM32CubeIDE)