
Hledám hodnou a chytrou paničku nebo pánečka, který mě naučí pěkně chodit a dělat nějaké triky, značka BP/DP. Zatím totiž chodím jako terminátor dvakrát střelený do hlavy ![]()
Projekt robopsa Vektor vznikl na Katedře měření s cílem umožnit studentům KyR pohrát si se zajímavým HW a využít později robota při prezentacích pro veřejnost, k zaujetí budoucích studentů.
Projekt bylo možné uskutečnit díky podpoře firmy BTL, která věnovala finanční prostředky na nákup základních komponent robota. Další HW komponenty poskytly firmy ST Microelectronics a Texas Instruments. Zbylé drobnosti a například výrobu plošných spojů sponzorovala Katedra měření.
V rámci předmětu Práce v týmu magisterského programu Kybernetika a robotika se šestici studentů podařilo dát robota dohromady a demonstrovat základní funkčnost.
Studenti (Vašek Jelínek, Lukáš Nejezchleb, Standa Novák, Michal Reiser, Pavel Svoboda a Matyáš Vlk) navrhovali plošné spoje pro řídicí a komunikační jednotku robota, psali kompletní firmware, 3D modelovali a tiskli, testovali jednotlivé komponenty, zapojovali, simulovali pohyb robota, kalibrovali serva a testovali navržené algoritmy chůze na reálném robotovi a nakonec vše prezentovali před svými spolužáky. Joshua Crofts v rámci závěrečného projektu v předmětu LPE (Laboratoře průmyslové elektroniky) navrhl “Vektor lights” moduly pro vizuální indikaci stavů robota a měření volného prostoru s 1D LIDARem od ST.

Loutkové vedení se osvědčilo při testování chůze…

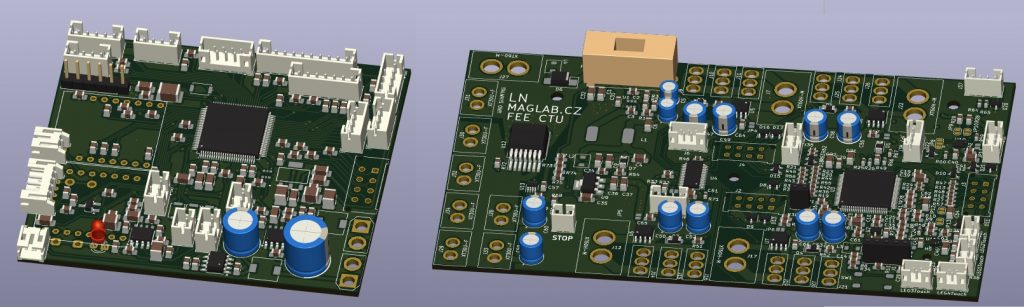
Konstrukce je založená na 13-ti servech RDS5160 (obyčejná, řízená PWM, ale docela silná…) + několik digitálních YB-SD15M která tvoří ruku. Byly navrženy tři desky s plošnými spoji – pro ovladač, komunikační modul a výkonový modul.
Ovladač – používá USB logitech gamepad,,který je přes rozhraní USB připojený k STM32L486VG MCU a několika dalším prvkům (enkodery, OLED display, inerciální senzory), pro komunikaci jsou použity LORA moduly.




Celý robot je napájený z Li-ion akumulátoru (6S-2P konfigurace, 18650 články, nominální napětí 22 V), napětí pro serva zmenšuje celkem pět modulů s LM5149-Q1 (výkonový step-down DCDC měnič od Texas Instruments).

Na robotovi není aktuálně nainstalováno žádné výkonné PC, které by umožňovalo provozovat například ROS a chůzi programovat takto. HW to umožňuje (napojení komunikační desky na jinou platformu, například pomocí UART nebo SPI), ale preferovaná varianta je modul v jazyce C (nebo C++) spouštěný na aktuálním STM32 HW, který využije data z dostupných senzorů (akcelerometr+gyroskop+magnetometr, senzory proudu servy), případně budoucích senzorů (senzor došlapu).

pokud by Vás projekt zaujal a chtěli jste se dozvědět více, kontaktujte Vojtěcha Petruchu